Split Block Bloom Filters
0x00 Block Bloom Filters
Block Bloom Filter是用了解决一般的Bloom Filter其Cache不友好的问题的。 Block Bloom Filter基本思路是将一个key要设置的bits都弄到一个block中,这个block一般根据cache line的大小来设计,比如一般的cache line大小为64bytes,512bit。Block Bloom Filter就可以看作是一个一般的Bloom Filters的一个数组,其添加/查询可以看作是现从Bloom Filters的数组里面找到一个Bloom Filters,然后设置这个Bloom Filters。这样就是Block Bloom Filters的第一个hash函数用于确定选择哪一个block,后面的hash函数用于选择一个block中的那些bits。其添加算法可以描述如下。
void block_insert(block b, uint x)
block masked = mask(x)
int bits_num = sizeof x * 8
for i in [0..7]
for j in [0..(bits_num-1)]
if (masked.getWord(i).isSet(j))
b.getWord(i).setBit(j)
block mask(uint x) {
block result
for i in [0..7]
uint y = x * salt[i]
result.getWord(i).setBit(y >> 27)
return result
Block Bloom Filters单个block里面就是一个一般的Bloom Filter,所以其单个block的FPR计算和一般的一样。对于整体的FPR来说,Block Bloom Filters会比一般的Bloom Filters要高一些。在[2]中的计算结果,Block Bloom Filters的FPR为 \(f_{bloom}(B, c, k) = \sum_{i=0}^{\infin} Poisson_{B/c}(i)\cdot f_{inner}(B, i, k).\) 其中B为bits数量,i为一个block内元素的数量,k为hash函数的数量,c为平均为每个元素分配的bits数量。这里使用了泊松分布来作为二项分布的一个近似。Block Bloom Filter这样的设计实际上对于FPR来说是不利的。[2]中的数据说的是在c = 8bit,B = 512 bit的时候,Block Bloom Filter的FPR为0.0231, [1]中的说Block Bloom Filters实现1%的FPR时,同样的空间一般的Bloom Filter可以实现0.63%的FPR,[1]中选择的block长度为256bit,即 B = 256 bit。
0x02 Split Block Bloom Filters
Split Block Bloom Filters则是在Block Bloom Filters上面的一些优化。前面的 Block Bloom Filters使用的在一个blocks里面每个workd都设置一个bit的方式,而在这里使用avx2指令一次性计算8个hash(使用_mm256_mullo_epi32 rehash之后在取最高的5bits),得到8个hash。然后将将一个ymm,即256长的一个寄存器当做8个32bit的整数,每个移动对应的位数。在与之前的做一个or,即完成设置。这个也是这里为什么选择256bit长的block的原因。[1]中给出的使用avx2指令的简单实现版本为:
// Takes a hash value and creates a mask with one bit set in each 32-bit lane.
// These are the bits to set or check when accessing the block.
__m256i make_mask(uint64_t hash) {
const __m256i ones = _mm256_set1_epi32(1);
// Set eight odd constants for multiply-shift hashing
const __m256i rehash = { INT64_C(0x47b6137b) << 32 | 0x44974d91,
INT64_C(0x8824ad5b) << 32 | 0xa2b7289d,
INT64_C(0x705495c7) << 32 | 0x2df1424b,
INT64_C(0x9efc4947) << 32 | 0x5c6bfb31};
__m256i hash_data = _mm256_set1_epi32(hash);
hash_data = _mm256_mullo_epi32(rehash, hash_data);
// Those five bits represent an index in [0, 31)
hash_data = _mm256_srli_epi32(hash_data, 32 - 5); // reducing the hash values from 32 bits to five bits.
return _mm256_sllv_epi32(ones, hash_data);
}
void add_hash(uint64_t hash, uint64_t num_buckets, __m256i filter[]) {
const uint64_t bucket_idx = block_index(hash, num_buckets);
const __m256i mask = make_mask(hash);
__m256i *bucket = &filter[bucket_idx];
_mm256_store_si256(bucket, _mm256_or_si256(*bucket, mask)); // or the mask into the existing bucket
}
Xor Filters: Faster and Smaller Than Bloom and Cuckoo Filters
0x10 基本结构
这篇Paper提出了也是一个类似Bloom Filter一样在一定fast positive probability的情况下给出一个key是否存在一个集合中的一个回答。Xor Filters号称能够实现比Bloom Filter和Cuckoo Filter更快的速度和更好的空间。Xor Filters的基本思路是将一个key映射到k-bit的fingerprint,这样错误率就是1/2^k。其讲所有keys保存到一个k-bit fingerprint的数组B里面,这个数组B的大小略大于元素集合的大小|S|,c ≈ 1.23 × |S|。其想要实现在这个B上,对于存在的key,有(B[h0(x)] xor B[h1(x)] xor B[h2(x)] = fingerprint(x))成立,其中h0 h1 h2以及计算fingerprint的都是独立的hash函数。这样探测一个key是否存在就可以使用fingerprint(x) = B[h0(x)] xor B[h1(x)] xor B[h2(x)]来表示。后面就是如何构造这样的一个满足要求的数组B。其构造主要分为两个步骤,一个就是构造一个满足要求的映射,返回一个保存了这个映射消息的一个stack,然后就是将B数组对应位置上面赋值的操作。
Algorithm 2 Construction:
Require: set of keys S Require: a fingerprint function
repeat
pick three hash functions h0, h1, h2 at random, independently from the fingerprint function
until map(S,h0,h1,h2) returns success with a stack σ (see Algorithm 3)
B ← an array of size ⌊1.23 · |S|⌋ + 32 containing k-bit values (uninitialized)
assign(σ,B,h0,h1,h2) (see Algorithm 4)
return the array B and the hash functions h0, h1, h2
Algorithm 3的核心是在B上面找到一个位置保存一个key的fingerprint,要求不能有两个key选择了同样的位置。另外一个要求是考虑到Algorithm 4赋值的操作是如下所示。Algorithm 4从顶到下遍历Algorithm 3得到的stack,并将对应的index赋予 fingerprint(x) xor B[h0(x)] xor B[h1(x)] xor B[h2(x)] 的值,这里这个 fingerprint(x) xor B[h0(x)] xor B[h1(x)] xor B[h2(x)] 其实就是B[h0(x)] xor B[h1(x)] xor B[h2(x)] 这三个位置值的xor。在保证正确性的要求下,其要求B[i]只能被写入一次,而且在写入[i]的时候被读取用于计算处理保存到B[i]的数值之后,其值也不能被修改。即B上一个位置只能修改一次,而且读取了之后就不能被写入。
Algorithm 4 Assigning Step (assign):
Require: σ,target array for fingerprint data B,hash functions h0,h1,h2
for (x,i) in stack σ do
B[i] ← 0
B[i] ← fingerprint(x) xor B[h0(x)] xor B[h1(x)] xor B[h2(x)]
end for
Xor Filters用Algorithm 3实现这样的目标,其基本思路是对每个key,选择3个可能的位置,将所有可能映射的消息保存到一个set的数组H之后。在H中选择只有一个key映射到这个位置的,将i保存到一个队列Q,这样就能保证其只会有一次的写入。这个选择的位置i和key一起保存到stack中,被Algorithm 4使用。在一个key选定了一个位置之后,其会从H中移除。然后根据新的情况需要的时候添加到Q之中。这样的方式决定了一个操作的位置和顺序,保证B中一个index只会被写入一次,而且读取了之后不会被写入。只会被写入一次很显然满足。读取了之后不会被写入可以用反证法来证明:假设其在Algorithm 4中,一个index被读取了之后还会在写入,那么在mapping操作的时候,其可以选择这个index。这样会出现这个key x可以选择index,stack下面的key也可以选择index。这样对应到H中对应位置的set不会只有一个元素,从而stack下面的这个key不会选择这个index的写入位置,故矛盾。所以一个index被读取了之后不会写入。
Require: set of keys S, k-bit integer-valued hash functions h0,h1,h2.
let c ← ⌊1.23 · |S|⌋ + 32
H ← an array of size c containing a set of keys (values from S), initially empty
for all x in S do
append x to H[h0(x)]
append x to H[h1(x)]
append x to H[h2(x)]
end for
Q ← initially empty queue
for i = 0 to |H | do
if the set H[i] contains a single key then add i to Q endif
end for
σ ← initially empty stack
while queue Q is not empty do
remove an element i from the queue Q
if the set H[i] contains a single key then
let x be the sole value in the set H[i] push the pair (x,i) on the stack σ
for j = 0 to 2 do
remove x from the set H[hj(x)]
if the set H [h j (x )] contains a single key then add h j (x ) to Q endif
end for
end if
end while
return success and the stack σ if |σ | = |S |, else return failure
Xor Filters的一个缺点是其构造的时候需要开辟一个与B等长的一个set的数组。另外其在两个元素/key出现了映射到三个同样的位置的时候,就无法处理,也就是说可能出现Algorithm 2的repeat操作,操作了很多次都无法映射成功。而且当构造的数据里面存在相同的元素的时候,这个总是会出现。
Stacked Filters: Learning to Filter by Structure
0x20 基本思路
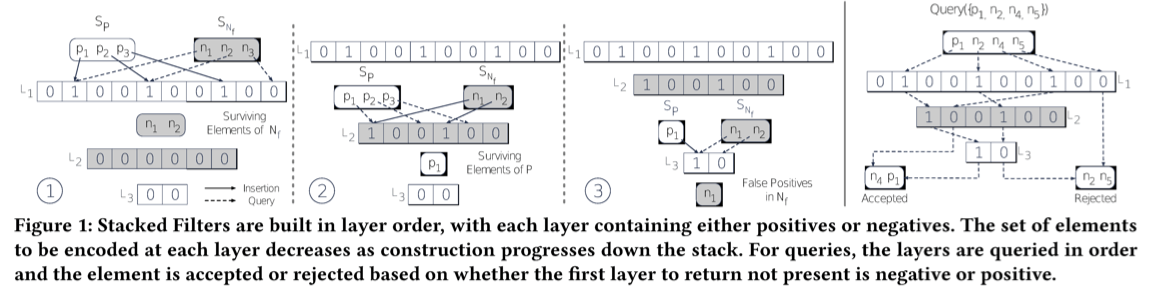
Stacked Filters的基本思路是使用多层的filters堆叠而成, 所以称之为Stacked Filters。其基本思路是,对于false-positive的元素,其出现的频率也是不一样的。如果有一种方式,将false-positive中元素变成可以过滤,剩下的为出现频率不高。从FPR来说可能没有变化,但是从查询次数的角度,给出错误回答的次数会降低。之前这样的一些思路是learning的方法,即从过去的查询中学习。这里的思路就是如下图所示。
- 其层数从1开始,奇数层为记录元素集合中出现过的元素,而偶数层记录知道的频繁查询的没有出现过的一些元素。按照下图中最右边的查询示意图。其在对于L1层就可以reject的元素,就可以直接给出reject的回到。如果L1层不能reject,则到L2层查询。L2层是通过频繁查询的一些不在集合中元素构造而来,如果其给出肯定的回答,则其可能存在,也可能不存在,需要继续往下面查找。如果L2其给出了否定的回答,则其表面没有出现在最频繁查询而且不存在集合中的之中,则直接给出accept,认为其存在。这样的话,在L2层筛选之后,能够得到L3的,一般是频繁查询的不存在集合中的元素。L3就可以针对这些元素来进行针对性过滤,提高其FPR的表现。
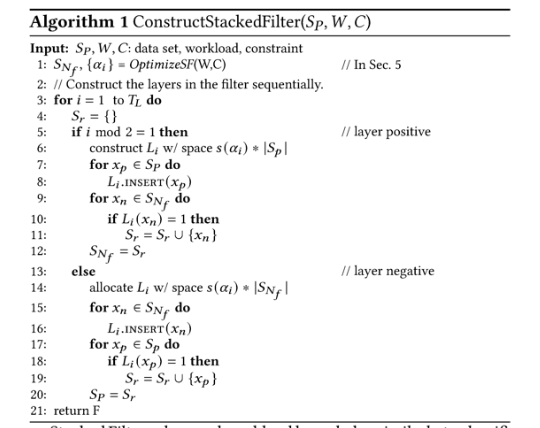
Stacked Filters其构造算法如下,构造是一个分层构造的过程。在构造的时候,需要知道数据集、worload的消息已经一些限制消息。其会根据一个优化算法给出那些认为是需要最早negative集合SN-f中记录的。然后后面分层构造的的时候,构造positive层的时候,记录在SN-f中存在但是给出错误回答哦的,这个会在下一negative层构造的时候被使用。构造negative层时候,也会有类似的一个操作。
这篇Paper后面还有很对的关于对Stacked Filters的FPR,以及优化,如何实现adaptive的一些分析。其风格也符合这篇paper作者之前的一些论文,比较多的数学推导。
参考
- Split block Bloom filters, arXiv.
- Cache-, Hash- and Space-Efficient Bloom Filters.
- Xor Filters: Faster and Smaller Than Bloom and Cuckoo Filters, arXiv.
- Stacked Filters: Learning to Filter by Structure, PVLDB ‘21.
